
实践成果 | 高适应性的四足机器人
日期:2025-10-17 作者:李家琦 来源: 浏览量:227
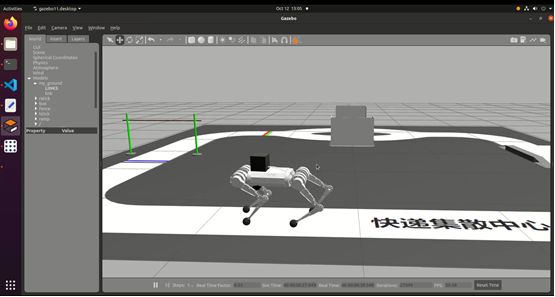
本设计聚焦复杂环境下的货物运输需求,仿真并实现一款具备高适应性的四足机器人,融合导航技术、三维视觉处理技术、二维平面视觉检测技术及机器人智能控制技术,构建起从环境感知到动作执行的全流程自主作业系统。机器人以仿生机械结构为基础,通过多技术协同突破复杂路面限制,精准完成货物承载与转运任务,为物流运输、野外作业等场景提供高效解决方案。
在核心控制层面,系统实现站卧自动控制与动态平衡控制的深度联动:借助陀螺仪、力传感器采集姿态数据,经智能算法实时调整关节驱动力,确保机器人在斜坡、碎石等路面站立稳定,卧倒时精准贴合地面完成货物装卸。运动控制模块则通过步态规划算法,适配行走、跨越、攀爬等多种动作模式,满足不同路况的移动需求。
使用多传感器融合单元同步采集激光雷达、摄像头、GPS等数据,三维视觉技术重构环境立体模型,二维视觉精准识别货物位置与路面障碍;结合点到点自动导航算法,机器人可自主规划最优路径,规避突发障碍并修正行驶偏差。
实际应用中,机器人通过视觉检测定位货物后,自动调整姿态完成抓取固定,在复杂路面以稳定步态行进,全程实时反馈位置、姿态及货物状态数据。通过物品运送演示验证,系统在崎岖路面的货物运输稳定性与路径精度均达到设计标准,有效突破了传统运输设备的场景限制。

【收藏本页】