
大连东软信息学院电子信息工程专业成立于2006年,先后获批辽宁省普通高等学校本科工程人才培养模式改革试点专业、创新创业改革试点专业、首批向应用型转变示范专业,2013年在辽宁省电子信息工程本科专业综合评价中排名第3,2019年被评为辽宁省普通高等学校一流本科教育示范专业,2020年获批国家级一流本科专业建设点。

智能六足巡检机器人的设计与实现
作者:蔡朝明
指导教师:吴天龙
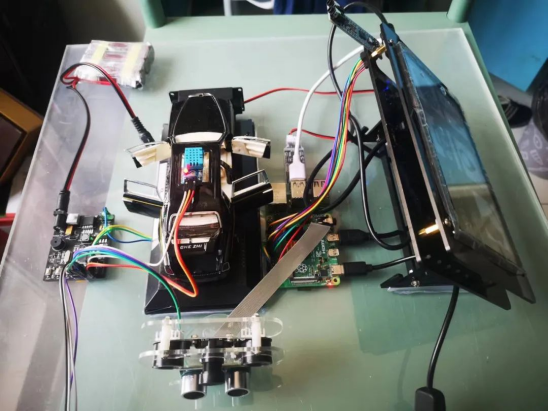
本设计是一款智能六足巡检机器人。该机器人采用树莓派连接摄像头进行画面采集,并通过WiFi实现视频上传。同时,树莓派还承担着与用户端WiFi通信的任务,并将用户端传输过来的控制命令通过串口传递给STM32执行。机器人控制采用STM32单片机实现包括自动循迹移动、环境传感器监测报警、视频录制与无线传输、远程控制(包括移动、机械臂和摄像头)以及OLED数据显示。用户图形界面开发采用Android开发。其中,自动循迹移动功能使机器人可以在不需要人为干预的情况下自主循迹,环境传感器监测报警功能可以实时监测机器人所处环境的温度、湿度等情况,并在出现异常时及时报警,视频录制与无线传输功能可以让用户远程查看机器人所拍摄的视频,远程控制功能可以让用户通过安卓设备对机器人进行远程控制,OLED数据显示功能可以让用户实时了解机器人的运行状态。本研究的成果可以为智能巡检领域的发展提供一定的参考。

无线充电巡检无人机的设计
作者:田盛龙
指导教师:吴天龙
本设计是一款巡检无人机,由四部分组成。首先,是无人机部分,由树莓派作为主控,负责摄像头数据的采集和处理,通过4G模块实现数据传输,将数据和视频流信息通过4G通信模块上传到云服务器;然后,是服务器部分,由云端服务器的后台服务作为中继,负责中转无人机的状态数据和视频画面;再后,是监控部分,通过PC端或手持设备上的APP,将无人机的视频画面、当前位置、运行状态等信息显示出来,最后,是无线充电部分,负责给无人机进行无线充电。
基于Cortex-A72的车载IVI系统设计
作者:张振山
指导教师:田华
本设计是车载电子的应用方案开发。基于Cortex-A72架构的车载IVI系统为驾驶员提供智能、便捷的服务,满足车载IVI系统的设计要求,为驾驶过程增添更多的便利和娱乐体验。该系统主要由Cortex-A72架构的Raspberry Pi和STM32单片机组成。Raspberry Pi作为主控负责处理用户界面、图形化显示以及用户交互,而STM32单片机作为下位机则承担电机控制、语音识别和传感器数据采集等任务。通过Qt图形化界面框架实现了人机互动、车身检测、GPS定位和音频娱乐等功能。
便携式智能实用掌上设备助手的设计与实现
作者:仓文博
指导教师:李凤坤
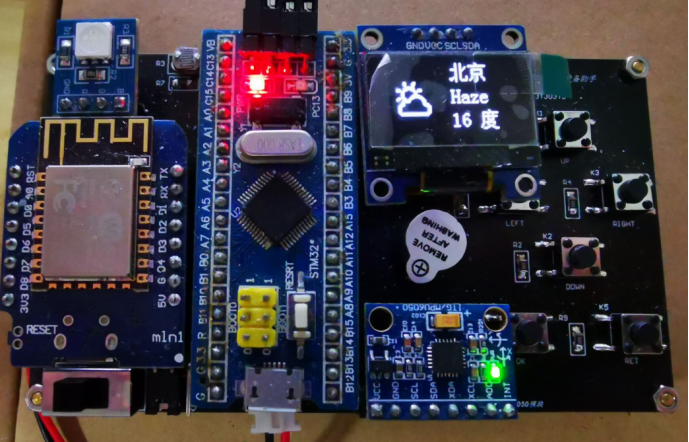
该便携式掌上设备助手,利用传感器、WiFi、数据结构与算法、通信等技术相结合设计而成。采用了STM32F103C8T6核心板作为主控,配备陀螺仪模块和ESP8266模块,用于获取设备助手的数据。用户可以随身携带设备助手,并使用它查看当前地区天气、时间、行走步数、系统设置、秒表、照明灯等实用功能。此外,该项目还开发了适配设备助手的上位机图形界面控制台。图形界面控制台与下位机通过两个HC-05蓝牙模块建立通信连接,连接成功后,用户可以通过设备助手实现对上位机的远程控制进行游戏、听音乐等娱乐活动。
基于STM32的包裹分拣系统的设计
作者:黄诚
指导教师:韩双双
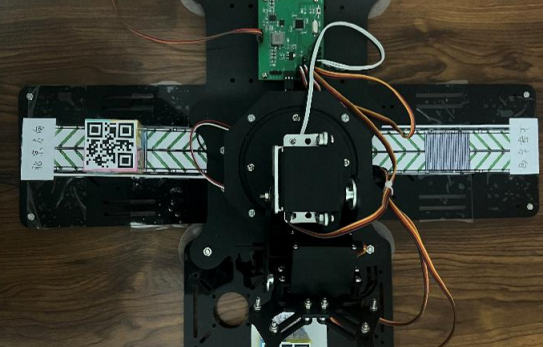
基于STM32的包裹分拣系统的设计目标是实现自动化包裹分类、分拣和管理,主要功能如下,当带有地区信息的二维码包裹进入指定位置,摄像头进行二维码识别,识别出二维码中的地区位置信息,同时机械臂的红外模块触发机械臂的启动。如果是北京方向的包裹机械臂就把包裹抓取到北京方向的传送带,如果是上海方向的包裹机械臂把包裹抓取到上海方向的传送带;从而达到包裹分拣的目的。系统由输入模块、分拣模块、通信模块、红外感应模块、二维码识别模块及控制模块组成,系统运行可靠稳定,能够提高快递分拣的工作效率和准确度,提升快递分拣服务体验。

基于STM32单片机的智能运动手表设计
作者:钟沙沙
指导教师:张彩
本论文是以STM32单片机为基础,针对年轻人和老年人设计开发的智能手表,具备心率血氧监测、温湿度检测、娱乐游戏、运动计步、时间闹钟设置、蓝牙通信以及OLED显示屏显示等功能,操作比较简单,使用也很便捷,功能完善,为人们的出行和日常生活提供便利,监测并预防一些意外的发生,降低医疗方面的压力,为人们的生命安全提供一定的保障。本设计采用了模块化的设计思想,这种设计思想使得硬件设备的组合更加方便,同时也提高了系统的可靠性,大大降低了系统设计的难度。此外,智能手表还具有体积小、功耗低等特点,非常适合携带和使用,经过测试验证,基本实现了预期的结果,证明了它的可行性和有效性。

四足仿生机器狗的设计
作者:王昱冲
指导教师:罗礼全
一种低成本的,具备遥控功能的四足仿生机器狗。这款机器狗至少拥有Walk和Trot两种步态的运动方式,并能实现蹲坐、探头、侧身等不同的姿态。在慢速运动和静态姿态下,该机器狗具备自稳能力,并能够适应相对复杂的地形。
- 上一篇:电子信息工程专业简介
- 下一篇:成为国一流后,电子信息工程专业将迎来哪些变化