
手势控制的智能机械臂的设计与实现
日期:2023-11-24 发布人:panrui@employee.dnui 浏览量:352
作品来源:毕业设计
指导教师:李鹤楠
学生团队:集成18003班 张诗睿
作品介绍
本设计以FPGA作为核心控制芯片,采用改良的Canny边缘检测为主要算法,搭配OV5640摄像头为图像输入源,通过摄像头采集手势视频图像,将采集到的图像使用灰度处理、高斯滤波、Canny算子进行图像边缘的有效提取,然后计算出处理之后手势区域的周长和面积,通过比对来确认实时手势,以实现手势的识别。然后通过板载串口将对应指令发送给机械手以此控制机械手臂的抓取及移动等动作。
图片展示
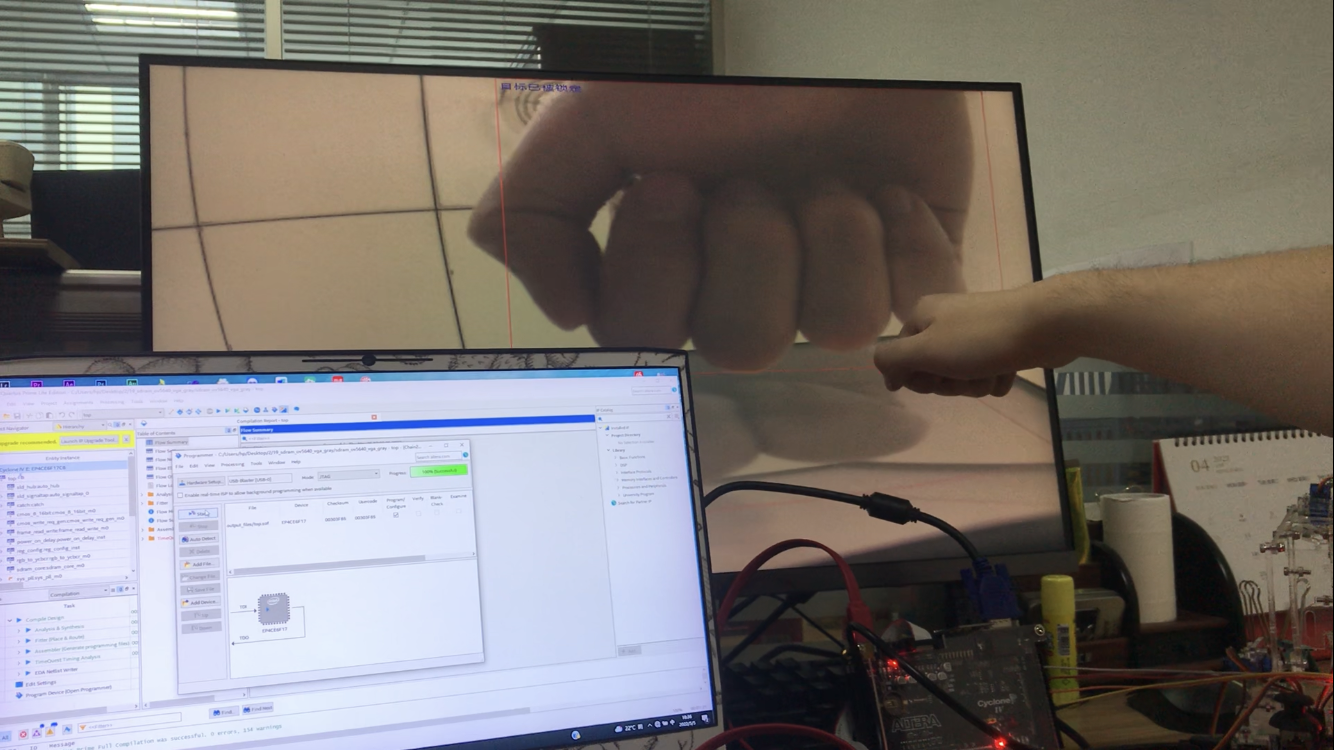
拳头手势识别测试图 |
拳头手势识别成功led0亮灯测试图 |
|
|
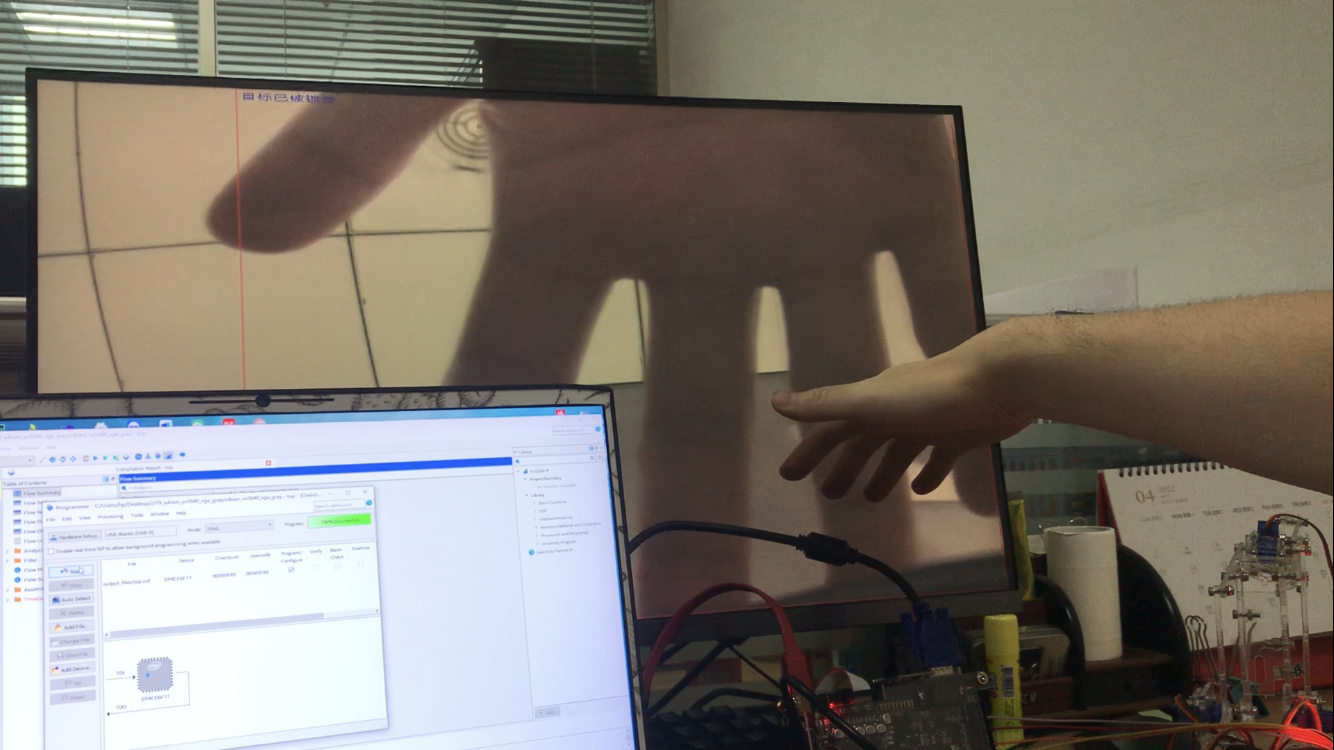
手掌手势识别测试图
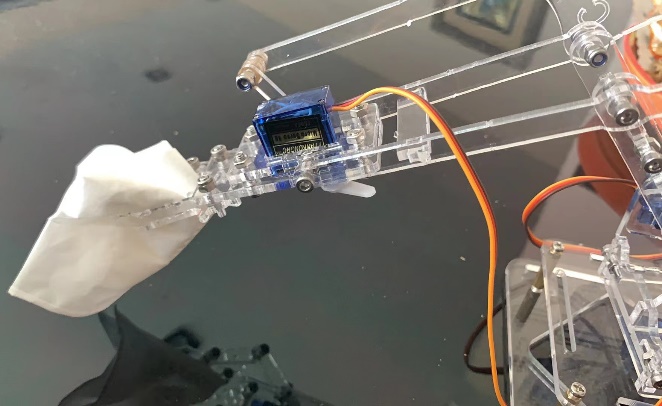
| 机械臂成功完成抓取测试图 |

【收藏本页】
- 上一篇:基于FPGA的图像处理算法的实现
- 下一篇:没有了